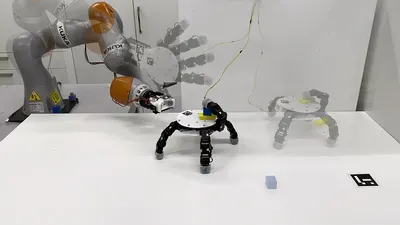
Gambar: Tangan robot dapat terlepas, merangkak untuk mengambil beberapa benda, dan memasang kembali. (Xiao Gao)
Jakarta, tvrijakartanews - Tangan manusia sering dipuji sebagai "puncak ketangkasan", tetapi selalu ada ruang untuk perbaikan. Dalam sebuah studi baru, para ilmuwan telah mengembangkan perangkat robot jari-jari gesit yang membuat penjepit daging.
Robot tersebut merupakan karya para peneliti dari Institut Teknologi Federal Swiss di Lausanne. Terletak di sekitar telapak tangan 16 sentimeter (lebih dari 6 inci), dipersenjatai dengan hingga enam jari berujung silikon yang dapat menguasai 33 jenis genggaman dan menahan tindakan untuk mencengkeram benda dengan berat hingga 2 kilogram (4,4 pon).
Tidak seperti tangan manusia, tangan robot mampu memegang benda dari kedua sisi telapak tangannya. Dilengkapi dengan jari yang sangat gesit dan multi-sendi, perangkat ini dapat mencengkeram beberapa objek secara bersamaan dengan pegangan seperti wakil.
"Tidak ada batasan nyata dalam jumlah benda yang dapat ditampung; jika kita perlu memegang lebih banyak benda, kita cukup menambahkan lebih banyak jari," kata Aude Billard, penulis studi dan kepala Laboratorium Algoritma dan Sistem Pembelajaran di Institut Teknologi Federal Swiss di Lausanne, dikutip dari IFL Science.
Paling mengejutkan, ia dapat melepaskan dari lengannya dan merangkak, sama seperti Thing dari Keluarga Addams.Tangan dapat jatuh ke lantai dan merangkak melintasi permukaan, menggunakan jari-jarinya sebagai kaki untuk berjalan seperti laba-laba, sambil mempertahankan kemampuannya untuk mengambil dan membawa benda.
"Perangkat kami dengan andal dan mulus melakukan 'manipulasi loko' - manipulasi stasioner yang dikombinasikan dengan mobilitas otonom - yang kami yakini memiliki potensi besar untuk robotika industri, layanan, dan eksplorasi," jelas Billard.
Meskipun robot mungkin terlihat seperti visi berteknologi tinggi dari masa depan, para peneliti mengatakan bentuknya sebenarnya terinspirasi oleh dunia alam.
“Banyak organisme telah mengembangkan anggota badan serbaguna yang beralih dengan mulus antara fungsi yang berbeda seperti menggenggam dan bergerak. Misalnya, gurita menggunakan lengannya yang fleksibel untuk merangkak melintasi dasar laut dan cangkang terbuka, sementara di dunia serangga, belalang sembah menggunakan anggota badan khusus untuk pergerakan dan penangkapan mangsa,” kata Billard.
Para peneliti membayangkan berbagai macam aplikasi, dari robot industri otonom hingga eksplorasi ilmiah di lingkungan yang menantang. Mungkin yang paling menarik, desainnya bahkan dapat mempengaruhi generasi anggota badan palsu berikutnya.
"Fungsi simetris dan reversibel sangat berharga dalam skenario di mana pengguna dapat memperoleh manfaat dari kemampuan di luar fungsi manusia normal. Sebagai contoh, studi sebelumnya dengan pengguna jari robotik tambahan menunjukkan kemampuan beradaptasi otak yang luar biasa untuk mengintegrasikan pelengkap tambahan, menunjukkan bahwa konfigurasi non-tradisional kami bahkan dapat melayani di lingkungan khusus yang membutuhkan kemampuan manipulasi tambahan,” kata Billard.